SIMATIC S7-1200,模拟输入, SM 1231 RTD温度传感器,RTD温度传感器模块 4个模拟输入
SIMATIC S7-1200 SM 1231,AI 4x16 bit RTD
订货号: 6ES7231-5PD32-0XB0
常问问题:
![]() S7-1200 是否支持 Modbus ASCII 通信模式?
S7-1200 是否支持 Modbus ASCII 通信模式?
西门子不提供支持上述通信模式的的现成指令,需要用户自己用自由口模式编程。
![]() Modbus RTU 指令 V1 和 V2 两个版本有什么区别?
Modbus RTU 指令 V1 和 V2 两个版本有什么区别?
Modbus RTU 指令版本 V2 将参数 “REQ” 和 “DONE” 添加到 “MB_COMM_LOAD” 指令。而且,“MB_MASTER” 和 “MB_SLAVE” 指令的 “MB_ADDR” 参数现在允许一个 UInt 值以进行扩展寻址。
![]() 同一 CPU 程序中是否可以同时使用两个不同版本的 Modbus RTU 指令?
同一 CPU 程序中是否可以同时使用两个不同版本的 Modbus RTU 指令?
不能在同一 CPU 程序中同时使用不同版本指令。用户程序的 Modbus 指令必须具有相同的主版本号;主版本组内的各个指令可具有不同的次版本号。
![]() S7-1200 通信模块 CM1241 是否可作为 Modbus RTU 主站或作为 Modbus RTU 从站?
S7-1200 通信模块 CM1241 是否可作为 Modbus RTU 主站或作为 Modbus RTU 从站?
CM1241 组态并编程调用 “Modbus_Comm_Load”指令,可将其设置为 Modbus RTU 通信模式。通过编程调用 “Modbus_Master” 指令,CM1241 可作为 Modbus RTU 主站,或调用 “Modbus_Slave” 指令,CM1241 可作为 Modbus RTU 从站。
![]() 注意:
注意:
无论 CM1241 作为 Modbus RTU 主站还是从站,都需要调用 “Modbus_Comm_Load” 指令进行编程,并且不能同时作为 Modbus RTU 主站与从站。
![]() CM1241/CB1241 Modbus RTU 通信是否支持两位停止位?
CM1241/CB1241 Modbus RTU 通信是否支持两位停止位?
支持。
![]() 注意:
注意:
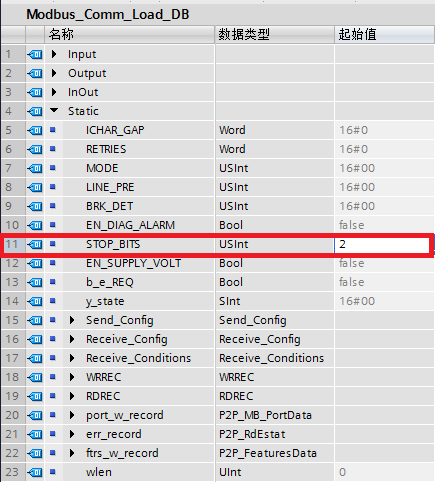
CM1241/CB1241 属性里可以设置停止位, 但是该模块用于 Modbus 通信时,此设置的停止位无效, 需要在 “Modbus_Comm_Load” 指令的背景 DB 的静态变量中修改 “STOP_BITS” 数值为 2。如图 2-3 所示:
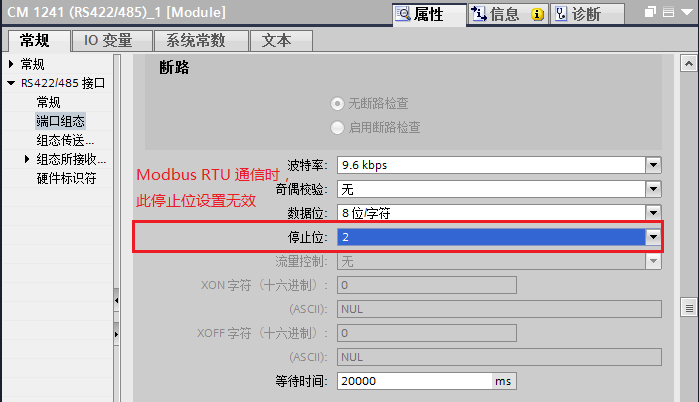
图 2. CM1241 配置停止位参数
"Modbus_Comm_Load" 指令的背景 DB 的静态变量中修改 "STOP_BITS" 数值为 2(默认值 = 1)。